Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacyDie Fertigung von Flugzeugrumpfschalen ist bei Kleinserien von Handarbeit und entsprechend hoher Flexibilität geprägt. Bei Großserien lohnt sich die Automatisierung mit komplexen Roboterzellen, wobei die Flexibilität in der Fertigung stark eingeschränkt wird.
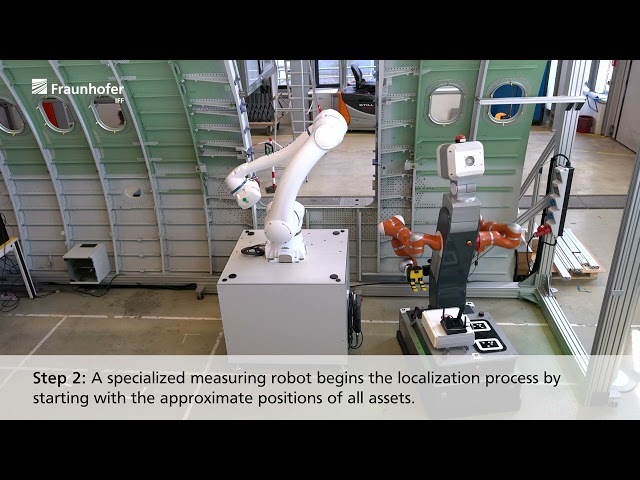
Mit dem Projekt soll ein Ansatz dazwischen verfolgt werden. Die Fertigung von Kleinserien kann heute wesentlich durch ortsflexible Robotersysteme unterstützt werden. Sie bearbeiten Bauteile mit Laserverfahren und nieten wesentliche Bereiche der Rumpfschalen zusammen. Mobile Messroboter stellen die Qualität sicher, das heißt sie messen ortsflexible Bearbeitungsroboter automatisch ein und überprüfen die Bearbeitungsergebnisse. Möglich wird dies durch Autonomie der Roboter und Roboter-Roboter-Kooperation. Die Handlungen der Roboter werden automatisch generiert. Personal ist hierfür nicht erforderlich. Zudem können unterschiedliche Prozesse flexibel umgesetzt werden.
Die »SWAP-IT«-Architektur sorgt für die Skalierbarkeit und optimierte Auslastung der Betriebsmittel.