
Kollaborative Roboter und digitale Assistenzsysteme sollen den Menschen zukünftig in einer anspruchsvolleren, sich verändernden Arbeitswelt entlasten.
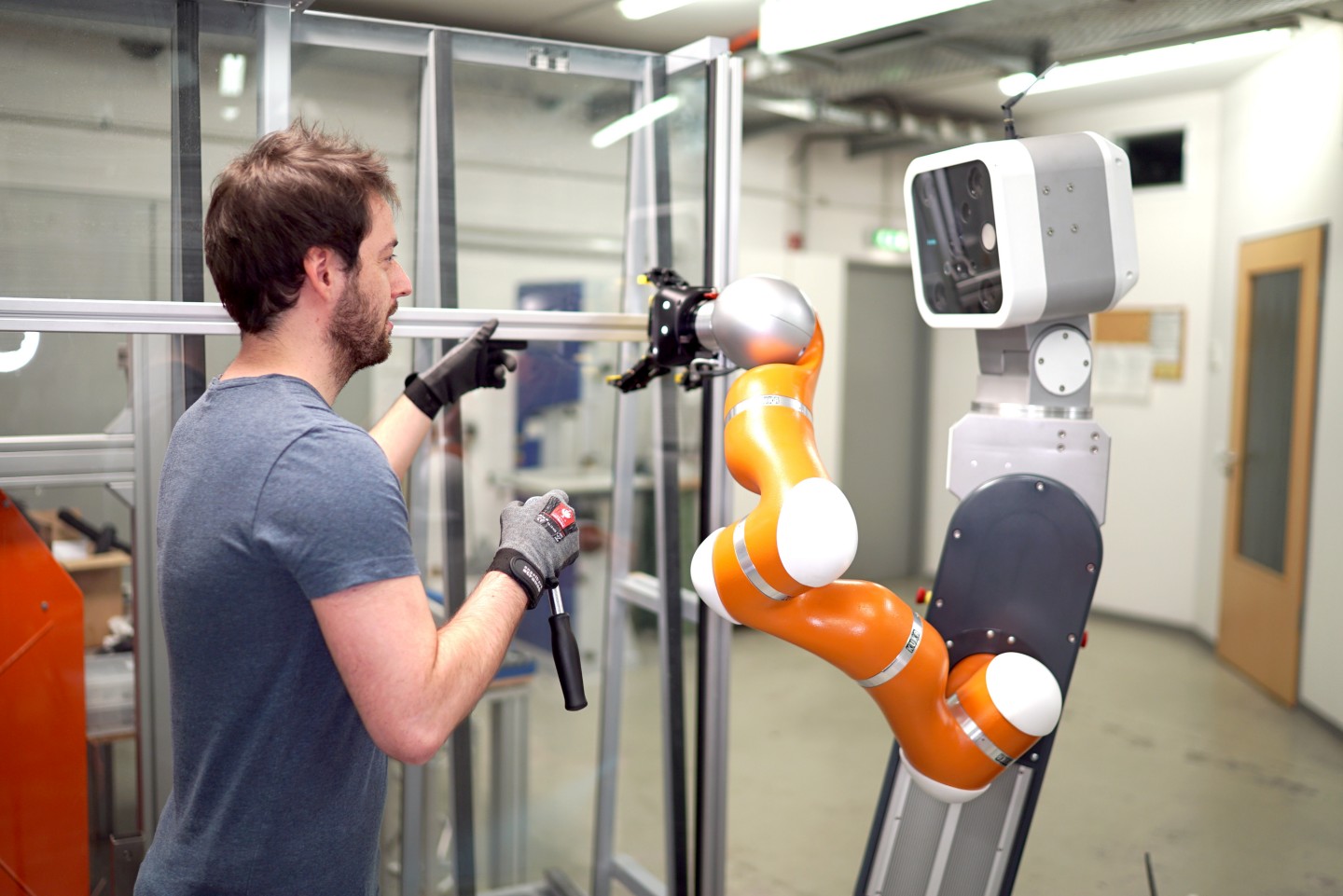
Die Kooperation von Mensch und Maschine ist kein neues Thema: In der Industrie und der Wissenschaft wird sie teilweise bereits erforscht und gelebt. In der Montage, der Verpackung, der Bestückung, der Verschraubung, aber auch in der Qualitätskontrolle verschwimmen die Grenzen zwischen den Arbeitsplätzen zusehends – Mensch und Roboter arbeiten mehr und mehr Hand in Hand.
Die Institute des Fraunhofer-Verbund Produktion bearbeiten Kompetenz- und Forschungsfelder im Bereich der Mensch-Roboter-Kollaboration und werfen dabei ein besonderes Augenmerk auf den Aspekt der Sicherheit.

