Human Robot Collaboration
Übersicht der Exponate
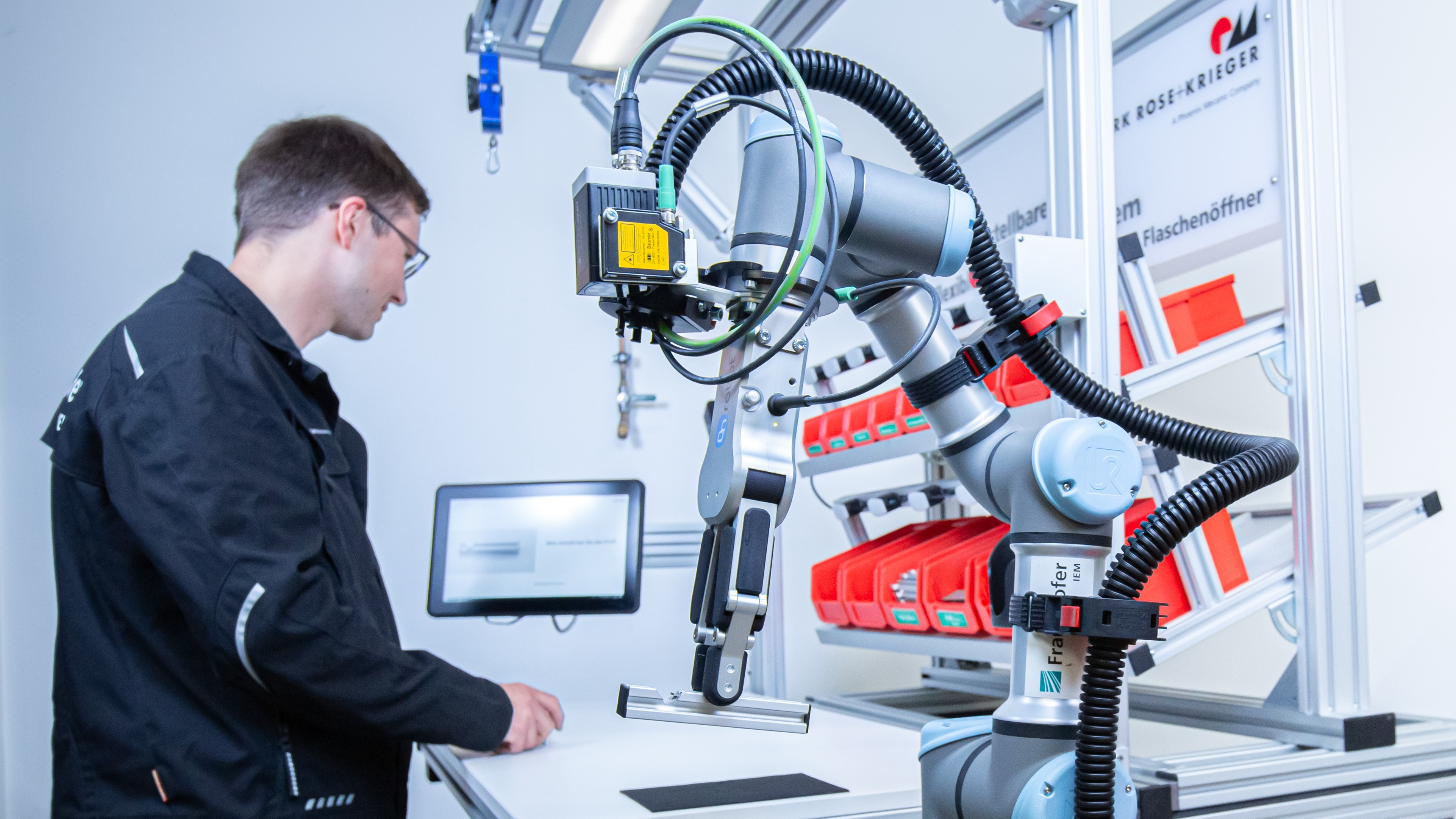
Cobot-Assistenz
Cobot-Assistenz in der Montage
Schwere körperliche oder monotone Arbeiten werden in der Industrie zunehmend von kollaborativen Robotern übernommen. Das Fraunhofer IEM unterstützt insbesondere kleine und mittlere Unternehmen, die sogenannten Cobots flexibel und kostengünstig einzusetzen. Dafür arbeitet das Forschungsinstitut mit RK Rose+Krieger als Komplettanbieter für Komponenten und Systemlösungen für die Automatisierungstechnik zusammen. Auf der Hannover Messe stellen sie eine Lösung für die Cobot-unterstützte Montage vor. Ein auf zwei zusätzlichen Bewegungsachsen montierter Assistenzroboter identifiziert eigenständig Bauteile auf einem Montagearbeitsplatz und unterstützt die Mitarbeiterinnen und Mitarbeiter beim Abtransport. Außerdem vermisst und klassifiziert er die Bauteile und führt automatisch eine Qualitätsüberwachung durch. Mitarbeiter in der Montage erhalten damit einen intelligenten Assistenten, der ihnen unnötige Laufwege abnimmt und ein zusätzliches Auge auf die Arbeitsergebnisse wirft. Die Montage-Cobots können flexibel und ohne Programmierkenntnisse für neue Arbeitsaufträge eingerichtet werden.
SensPro
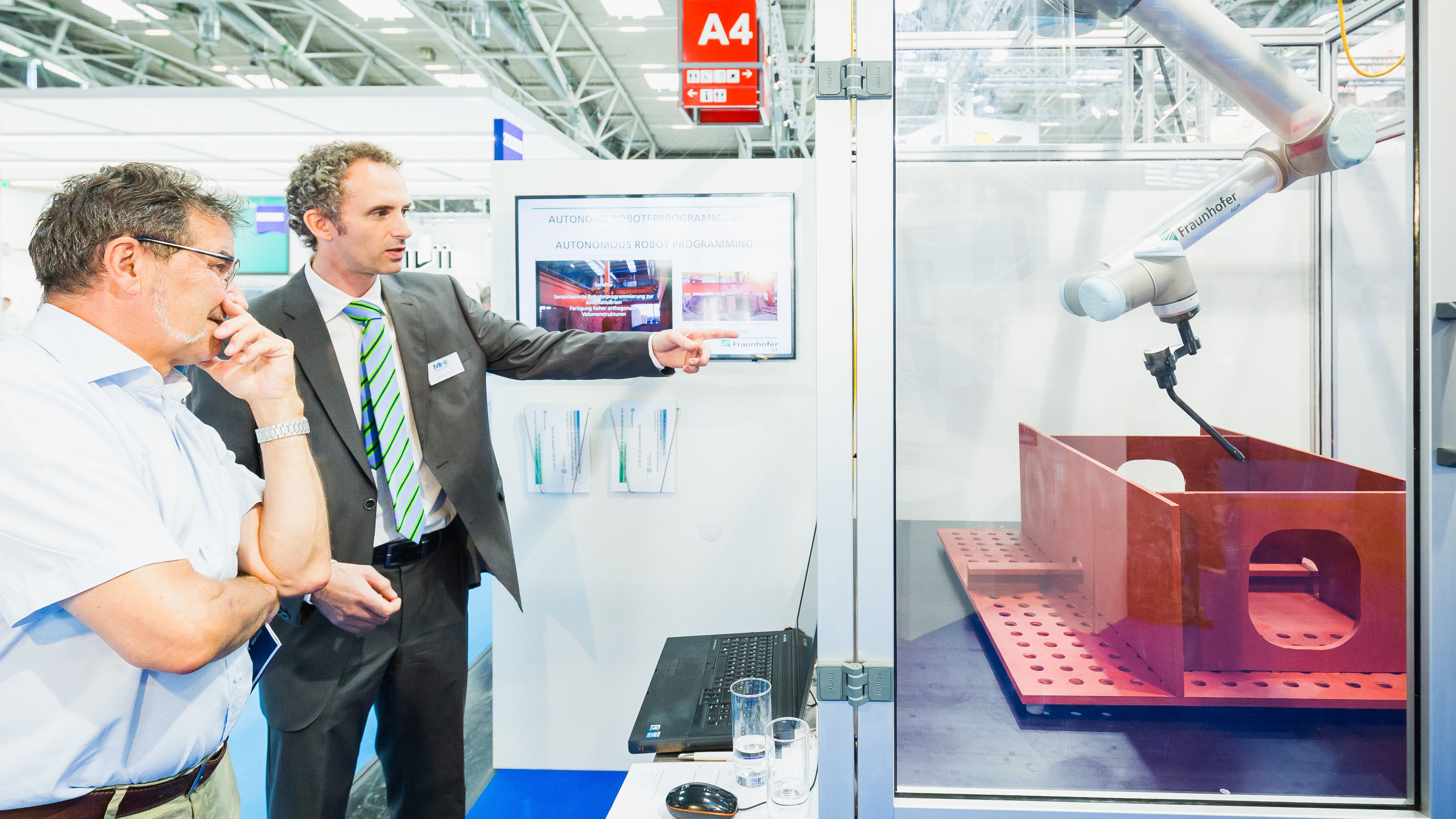
Sensorbasierte Roboterprogrammierung
Die Rostocker Wissenschaftler stellen eine innovative Methode zur automatischen Programmierung von Schweißrobotern für die Produktion von Stahlvolumenstrukturen vor. Um die individuelle Programmgenerierung hervorzuheben, können Besucher ein frei bewegliches Modell eines Schiffspanels so manipulieren, dass ein 3D-Laserscanner Bauteile und Schweißnähte neu identifizieren muss. Anschließend werden Schweißbahnen vom Roboter beispielhaft abgefahren.
Computer-Aided-Safety

Computer-Aided-Safety (CAS)
Mit Computer-Aided-Safety definiert das Fraunhofer IFF eine neue Generation von Werkzeugen und -methoden, die speziell auf die Planung von MRK-Applikationen zugeschnitten sind. Sie lassen sich nahtlos in Expertenprogramme Dritter integrieren und für den Planungsprozess bereitstellen. In Form einer Programmerweiterung ergänzen sie dort nützliche Funktionen, die besondere Merkmale und Eigenschaften der normativen Sicherheitsanforderungen direkt in den traditionellen Ablauf eines Planungsvorhabens einbeziehen. Durch visuelle und interaktive Elemente zeigen sie dem Planer an, wo die Grenzen seiner Applikation gemäß der gewählten kollaborativen Betriebsart und deren Sicherheitsanforderungen liegen. Zukünftige Assistenten geleiten ihn durch komplexe Sachverhalte zum optimalen und sicheren Entwurf vom Anlagenlayout bis zum Roboterprogramm.
Taktilsensorik

Taktilsensorik
Die am Fraunhofer IFF entwickelte Taktilsensorik lässt sich in unterschiedliche Greifer integrieren und ermöglicht dank der hohen Orts- und Kraftauflösung sowohl die Anwesenheitskontrolle von Objekten als auch die Erkennung der Lage und ggf. Verrutschen im Greifer. Darauf aufbauende adaptive Greifstrategien erlauben die flexible Anpassung und Optimierung von Prozessen sowie ein gefühlvolles Aufnehmen zerbrechlicher Objekte bzw. Klassifizierung unbekannter Objekte.
EPIC

EPIC - Interaktiver Demonstrator zum Kooperationsprojekt
Das EPIC Centre of Excellence in Production Informatics and Control ist eine langfristige Kooperation zwischen dem Fraunhofer IPK, IPT, IPA, Fraunhofer Austria und unserem ungarischen Partner der EPIC Inno Labs. In dem gemeinschaftlichen Exponat stellen wir eine Interaktive Landkarte mit CPPS-Anwendungen, welche im Rahmen der Kooperation entwickelt wurden, dar. In einem virtuellen Rundgang lernt der Besucher innovative Lösungen im Bereich Mensch Roboter Kollaboration kennen.
Multimodale Mensch-Roboter-Interaktion

Multimodale Mensch-Roboter-Interaktion am Sichtprüfplatz
In naher Zukunft sollen Roboter am Sichtprüfplatz die schweren, zu prüfenden, Teile in einer, für den Menschen, ergonomischen Position halten und bewegen können, während dieser die Qualität prüft. Der Prozess, die 3D-Fehlerdokumentation sowie der Roboter werden durch eine projizierte AR-Benutzerschnittstelle per Handgesten und Spracheingaben bedient. Am Stand des Fraunhofer HHI können Interessierte u. a. die Steuerung des Roboters durch eigene Gesteneingaben übernehmen.
Mobile Interaktion³
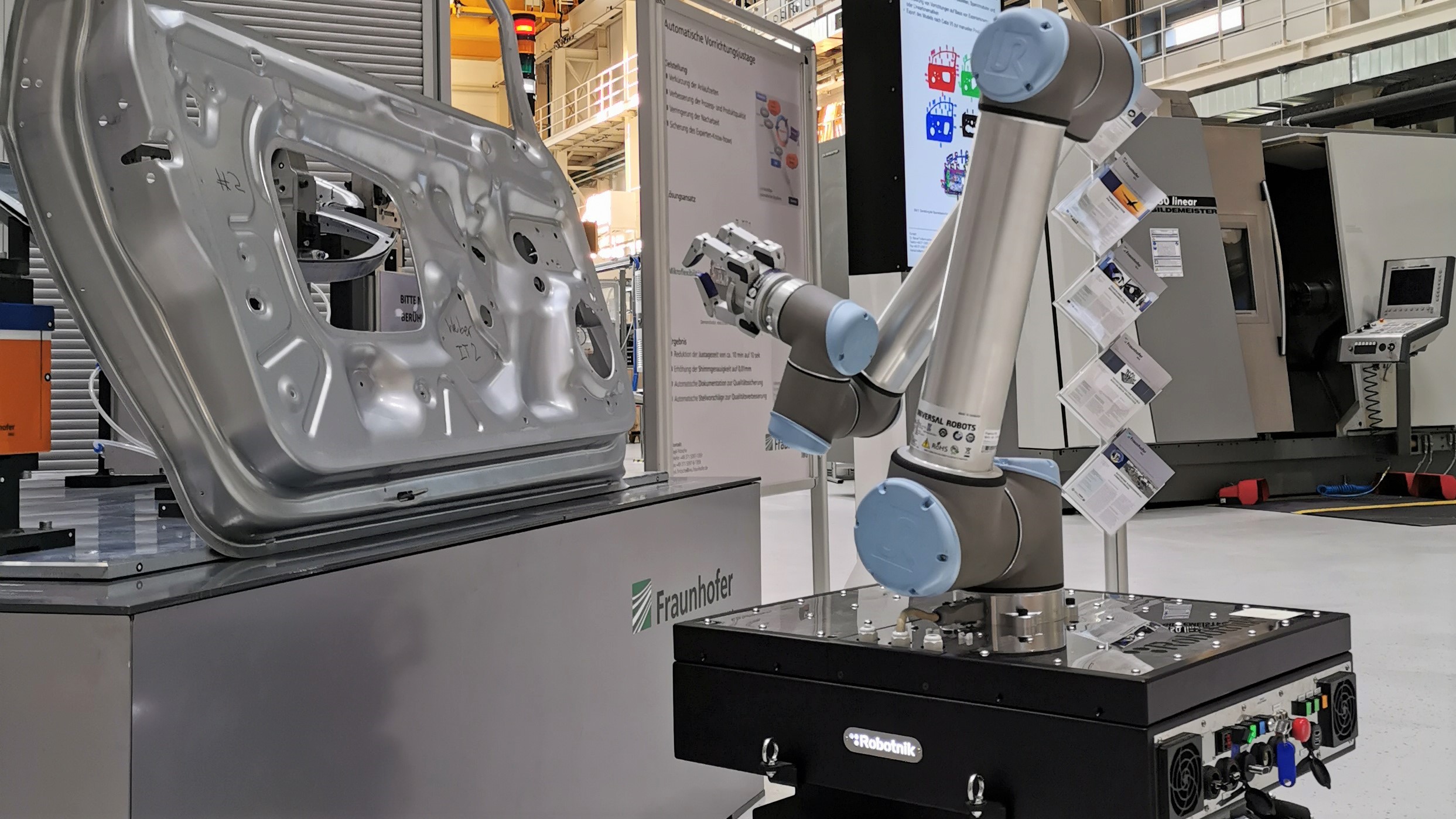
Mobile Interaktion³
Durch Mensch-Roboter-Interaktion die Fertigung im laufenden Betrieb optimieren und die Effizienz steigern – dies erleben die Messebesucher mit dem Produktionsszenario: Die Interaktion des Werktätigen mit dem mobilen Roboter und dem bewegten Werkstück (Autotür). Der Clou: Algorithmen zur Mensch- und Werkstückerkennung erlauben die autonome, synchrone Verfolgung von Werkstück und Menschen. Der Roboter befindet sich dabei auf einem fahrerlosen Transportsystem mit simultaner Echtzeit-Bahnplanung.
Sensorintegration u. Designfreiheit

Sensorintegration und Designfreiheit bei additiv gefertigten Greifern
Kleinserienproduktion wirtschaftlich machen: Selektives Lasersinter- und Schmelzschichtverfahren bei Kunststoffbauteilen ermöglicht eine werkzeuglose Fertigung mit niedrigem Zeit- und Kostenaufwand sowie freier Form- und Bauteilgestaltung. Am Beispiel eines additiv gefertigten und mit Endlosfasern verstärkten Fahrradrahmens werden die herausragenden strukturmechanischen Eigenschaften (u.a. hohe Festigkeit) demonstriert.